聯係我們
聯係電話:021-55884002
聯係地址:上海市閔行區江凱路177號

每日一博
MPS模塊化柔性自動化生產線實訓係統 MPS模塊化柔性自動化生產線實訓係統實訓裝置由上料檢測站、機械手搬運站、自動加工站、安裝搬運站、分類站、5.7英寸觸摸控製屏、常用工具及備件箱等部分組成。...[詳情]
推薦產品
-

型號:TWSA-01
品名:電子工藝實訓平台
分類:電子工藝實訓教學設備
-

型號:TWB-801A
品名:柔性加工係統實訓...
分類:機電一體化實訓設備
-

型號:TWB-QR04
分類:工業機器人實訓設備
-

型號:TW-318C
品名:通用電工電子實驗...
分類:通用電工.電子教室


熱門產品
-

型號:TWT-WXGB
品名:高性能中級維修電...
分類:維修電工實訓考核
-
型號:TW-X32
品名:新型微機原理與接...
分類:實驗箱係列
-

型號:TW-QY37
品名:便攜式氣動傳動基...
分類:氣動液壓PLC實驗台
-

型號:TW-188G型
品名:電工電子電拖可編...
分類:電工電子技能實訓考核
MES網絡型模塊式柔性自動化生產線實訓設備

- [產品分類]:工業機器人實訓設備
- [規格型號]:TWB-QR10型
- [產品價格]:詢價
- [參數下載]:
- [聯係電話]:021-55884002
- [QQ]:
- [微信]:

- 已有 17712 人關注該產品

產品詳情
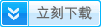
TWB-QR10型MES網絡型模塊式柔性自動化生產線實訓設備
一、產品概述:
模塊式柔性自動化生產線實訓係統是一種最為典型的機電一體化、自動化類產品,它是為職業院校、技工學校、教育培訓機構等而研製的,它適合機械製造及其自動化、機電一體化、電氣工程及自動化、自動化工程、控製工程、測控技術、計算機控製、自動控製、機械電子工程、機械設計與理論、等相關專業的教學和培訓。它在接近工業生產製造現場基礎上又針對教學進行了專門設計,強化了各種控製技術和工程實踐能力。
實訓係統由8個單元組成。分別為:上料檢測單元、搬運單元、加工檢測單元、分揀單元、傳送分揀單元、機器人單元、安裝單元、分類倉儲單元
視覺識別單元,控製係統可以選用西門子,三菱或歐姆龍的PLC進行控製,具有較好的柔性,即每站各有一套PLC控製係統獨立控製,在基本單元模塊培訓完成以後,又可以將相鄰的兩站、三站…直至八站連在一起,學習複雜係統的控製、編程、裝配和調試技術。
實訓係統包含了機電一體化專業中的氣動、電機驅動與控製、PLC、傳感器等多種控製技術,適合相關專業學生進行工程實踐、課程設計及初上崗位的工程技術人員進行培訓,是培養機電一體化人才的理想設備。

參考圖(以實物為準)
二、產品特點
1、係統將機械、氣動、電氣控製、電機傳動、傳感檢測、PLC以及工業網絡控製技術有機地進行整合,結構模塊化,便於組合,可以完成各類單項技能訓練和綜合性項目訓練。可以進行機械部件安裝與調試、氣動係統的安裝與調試、電氣控製電路的安裝和PLC編程、機電設備安裝與調試、自動控製係統安裝與調試、工業網絡控製係統安裝與調試於一體,能較好地滿足實訓教學、工程訓練的需要。
2、係統無論機械結構還是控製,都采用統一標準接口,具有很高的兼容和擴展性,隨工業現場技術的快速發展,本係統可以緊跟現場技術升級擴展,深入地滿足實訓教學的需要。
3、本係統可以鍛煉學習者創新思維和動手能力,學習者可以利用本係統從機械組裝、電氣設計、接線、PLC編程與調試、現場總線組建與維修等方麵進行工程訓練。
4、西門子PLC采用西門子PROFINET網絡通信,使各站之間的控製信息和狀態數據能夠實時相互交換,配有10英寸,256色工業彩色觸摸屏,實現工業控製。
三、技術性能
1、輸入電源:單相三線AC220V±10% 50Hz
2、工作環境:溫度-10℃~40℃ 相對濕度≤85%(25℃)海拔<4000m
3、裝置容量:≤1.5kVA
4、外形尺寸:380cm×170cm×140cm
5、安全保護:具有漏電壓、漏電流保護,安全符合國家標準
四、係統組成及配置:
(一)上料檢測單元
1、主要組成與功能
由料鬥、回轉台、導料機構、平麵推力軸承、工件滑道、提升裝置、檢測工件和光電開關、開關電源、可編程序控製器、按鈕、I/O接口板、通訊接口板、電氣網孔板、直流減速電機、電磁閥及氣缸組成,主要完成將工件從回傳上料台依次送到檢測工位,提升裝置將工件提升並檢測工件是否到位。
(1)料鬥:用於存放物料。
(2)回轉台:帶動物料轉動
(3)導料機構:使物料在回轉台上能按照設定好的方向旋轉,輸送工件。
(4)工件滑道:使物料下滑到物料台上。
(5)直流減速電機:用於驅動回轉台轉動,通過導料機構輸送工件。
(7)光電傳感器:檢測物料到達等待抓取位。
(8)磁性傳感器:用於氣缸的位置檢測。當檢測到氣缸準確到位後將給PLC發出一個到位信號。(磁性傳感器接線時注意藍色接“-”,棕色接“PLC輸入端”)。
(9)單杆氣缸:由單向氣動電控閥控製。當氣動電磁閥得電,氣缸伸出,同時將物料送至直線移動裝置上。
(10)警示燈:係統上電、運行、停止信號指示。
(11)安裝支架:用於安裝提升氣缸及各個檢測傳感器。
(12)控製按鈕板:用於係統的基本操作、單機控製、聯機控製。
(13)電氣網孔板:主要安裝PLC主機模塊、空氣開關、開關電源、I/O接口板、各種接線端子等。
2、主要技術指標
(1)控製電源:直流24V/4.5A
(2)PLC控製器:西門子
(3)永磁直流減速電機:ZGB60R-45SRZ/458i/8W/24V
(4)電磁閥:4V110-06
(5)調速閥:出氣節流式
(6)磁性傳感器:D-C73L
(7)單杆氣缸:CDJ2B16-75
(8)光電傳感器:SB03-1K
(二)搬運單元
1、主要組成與功能
氣動機械手由:氣動手指、雙導杆氣缸、單杆氣缸、旋轉氣缸、磁性傳感器、開關電源、可編程序控製器、按鈕、I/O接口板、通訊接口板、電氣網孔板、多種類型電磁閥組成。主要完成將工件從上料單元搬運到加工單元待料區工位。
(1)氣動機械手:完成工件的抓取動作,由雙向電控閥控製,手爪放鬆時磁性傳感器有信號輸出,磁性開關指示燈亮。
(2)雙導杆氣缸:控製機械手臂伸出、縮回,由雙向電控氣閥控製。
(3)回轉台:采用旋轉氣缸設計,由雙向電控氣閥控製機械的左、右擺動。
(4)單杆氣缸:由單向氣動電控閥控製。當氣動電磁閥得電,氣缸伸出,同時將物料送至等待位。
(5)磁性傳感器:用於氣缸的位置檢測。當檢測到氣缸準確到位後將給PLC發出一個到位信號。(磁性傳感器接線時注意藍色接“-”,棕色接“PLC輸入端”)。
(6)開關電源:完成整個係統的供電任務。
(7)I/O接口板:完成PLC信號與傳感器、電磁信號、按鈕之間的轉接。
(8)控製按鈕板:用於係統的基本操作、單機控製、聯機控製。
(9)安裝支架:用於安裝提升氣缸及各個檢測傳感器。
(10)電氣網孔板:主要安裝PLC主機模塊、空氣開關、開關電源、I/O接口板、各種接線端子等。
2、主要技術指標
(1)控製電源:直流24V/4.5A
(2)PLC控製器(西門子)
(3)電磁閥:4V110-06-DC24V
(4)調速閥:出氣節流式
(5)磁性傳感器:D-C73
(6)氣動機械手:MHZ2-16D
(7)旋轉氣缸:MSQB20R
(8)雙聯氣缸:CXSM15-100
(9)單杆氣缸:CDJ2KB16-45
(三)加工與檢測單元
1、主要組成與功能
由6工位回轉工作台、刀具庫(3種刀具)、旋轉式加工係統、加工組件、檢測組件、步進驅動器、兩相步進電機、光電傳感器、接近開關、開關電源、平麵推力軸承、可編程序控製器、按鈕、I/O接口板、電氣網孔板、通訊接口板、直流減速電機、多種類型電磁閥及氣缸組成,回轉工作台有六個旋轉工位,加工站主要完成工件的加工(鑽孔、銑孔),並進行工件檢測。
(1)單杆氣缸:檢測單杆氣缸進行深度測量,單向電控氣閥控製。當電控氣閥得電,氣缸升出,檢測打孔深度。
(2)薄型雙導杆氣缸:刀具主軸電機的上升與下降由薄型雙導杆氣缸控製,氣缸動作由單向電控氣閥控製。
(3)輔助加工裝置:由單杆氣缸推動頂杆機構,實現對工件的夾緊。
(4)電感傳感器:轉盤旋轉到位檢測,在工位到位後傳感器信號輸出。(接線注意棕色接“+”、藍色接“-”、黑色接輸出)
(5)光電傳感器:用於檢測工件的正常與否,當工件為正常時,傳感器有信號輸出;反之,無輸出。(接線注意棕色接“+”、藍色接“-”、黑色接輸出)
(6)步進電機:采用步進電機旋轉,進行刀具庫的選擇。
(7)加工電機:采用直流電機旋轉,模擬鑽頭軸轉動,模擬絞刀擴孔等完成工件加工。
(8)搬運裝置:裝置上設有六個工位,分別為:待料工位、加工工位、檢測工位、中轉工位,工件的工位轉換,由電感傳感器定位,直流減速電機控製。
2、主要技術指標
(1)控製電源:直流24V/4.5A
(2)PLC控製器:西門子
(3)步進電機驅動器:三相驅動輸出,電流≥5A,細分≥10000步/圈
(4)步進電機:573J09軸長:30mm6A
(5)直流減速電機(加工電機):ZGB60R-45SRZ/458i/8W/DC24V
(6)直流減速電機(搬運裝置):ZGA25RP37.9i/DC24V/rpm:120
(7)電磁閥:4V110-06
(8)透明繼電器:ARM2F-L/DC24V帶燈
(9)調速閥:出氣節流式
(10)磁性開關:D-C73L、D-A73L
(11)氣缸:CDJ2B16-45/CXSM15-100
(12)光電開關:E3Z-LS61
(13)電感傳感器:LG8-1K
(14)電感傳感器:LE4-1K
(四)搬運分揀單元
1、主要組成與功能
由擺台、無杆氣缸、薄型氣缸、氣動手指、推料氣缸、磁性傳感器、廢料存儲器、工業導軌、開關電源、可編程序控製器、按鈕、I/O接口板、通訊接口板、電氣網孔板、多種類型電磁閥組成,主要完成根據上一站的加工完成信號和廢料信號,完成廢料分揀、搬運任務。工件搬運到成品輸送線上或搬運到廢料盒處,擺台返回原位等待下一個工件。
(1)擺台:由薄型氣缸控製,實現三個位置向左、中間、向右的擺動。
(2)前臂單杆氣缸:控製擺台前臂上下動作,由單向電控閥控製,電磁閥得電,前臂底下。
(3)電磁閥:用於控製各個氣缸的升出、縮回動作。
(4)推料氣缸:完成廢料的分揀任務。
(5)廢料存儲器:係統檢測為廢料的工件,分揀出來,由推料氣缸將工件推入廢料存儲器內。
(6)氣動手指:完成工件的夾取任務。
2、主要技術指標
(1)控製電源:直流24V/4.5A
(2)PLC控製器:西門子
(3)電磁閥:4V110-06DC24V
(4)調速閥:出氣節流式
(5)磁性開關:D-C73
(6)氣缸:CDJ2B16-30
(7)氣動手指:MHZ2-16D
(8)浮動接頭:SC-20-F/M6*1
(五)傳送分揀單元
1、主要組成與功能
由直線皮帶輸送線、分揀料槽、旋轉氣缸、變頻器、三相交流減速電機、光電傳感器、光纖傳感器、顏色傳感器、電磁閥、開關電源、按鈕、I/O接口板、通訊接口板、電氣網孔板等組成,主要完成將材料顏色不合格的工件分揀出來,同時將合格產品傳送至下一站。
(1)直線皮帶輸送線:主要完成將物料輸送到相應的位置
(2)分揀料槽:完成將材料顏色不合格的工件分揀出來
(3)旋轉氣缸:將物料導入料槽,由單向電控氣閥控製。
(4)變頻器:控製交流電機,實現變頻調速。
(5)三相交流減速電機:驅動傳送帶轉動,由變頻器控製。
(6)光電傳感器:當有物料到放入時,給PLC一個輸入信號。(接線注意棕色接“+”、藍色接“-”、黑色接輸出)。
(7)光電傳感器:檢測上一單元的物料。
(8)光纖傳感器:物料經過時檢測物料的顏色。
(9)顏色傳感器:物料經過時檢測物料的顏色。
2、主要技術指標
(1)控製電源:直流24V/4.5A
(2)PLC控製器:西門子
(3)變頻器:V20功率:0.37KW
(4)三相交流減速電機:41K25GN-S3/4GN10K
(5)電磁閥:4V110-06
(6)調速閥:出氣節流式
(7)磁性開關:D-A93L
(8)氣缸:MSQB10R
(9)光電傳感器:SE01-1K
(10)光纖傳感器:E3X-NA11E32-DC200
(11)電容傳感器:JD-CP18-30DN
(六)機器人單元
1、主要組成與功能
1.1、工業機器人本體係統配置參數:
1) 功能、參數及特點描述:
① ABB機器人IRB120-3/0.58,有效負載3kg,臂展0.58米,重複定位精度0.01mm;鋁合金馬達,結構輕巧,功率強勁,確保精準度,本體重25kg;多角度安裝,可使其不受任何空間限製;氣路管路與用戶信號線纜由機身底腳至手腕全部嵌入機器人內部,利於機器人集成;
② 配套IRC5工業緊湊型控製器,有效節省占地空間,AC220V電源,外置式信號接頭,簡化了調試步驟;
③ 帶RobotStudio機器人控製軟件,可有效提升編程速度,軟件帶仿真功能,可隨時驗證編程效果;
④ 本體到控製器3~7m長電纜;
⑤ 示教器具中文操作界麵,本體到示教器3~7m長線纜;
⑥ 帶DC24V 16in/16out IO卡;
⑦ 底座由20mm厚鋼板與Φ160mm鋼管焊接而成,表麵發黑處理,堅固耐用,能有效防止鏽蝕;底板有6組膨脹螺絲與地麵固定,保證安裝的穩固,連接機器人的腰型孔設計特別適合小型機器人安裝,並能滿足多種同類型機器人安裝使用;尺寸:400×350×405mm;
⑧ 配置3組電磁閥組,為機器人安裝不同夾具提供動力,連接方便快捷;
2) 單套配置:
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
機器人 |
IRB120-3/0.58 3公斤 |
套 |
1 |
|
1) |
本體 |
3公斤,580mm行程半徑 |
台 |
1 |
|
2) |
控製器 |
220V電源,本體配套 |
個 |
1 |
|
3) |
IO卡 |
24V ,16輸入/16輸出 |
個 |
1 |
|
4) |
軟件光盤 |
機器人光盤 |
個 |
1 |
|
2 |
機器人底座 |
鋼板焊接 |
台 |
1 |
|
3 |
電磁閥組 |
2組獨立 |
套 |
1 |
3) 工業機器人係統圖片:

(1)機械手:與塔吊臂結合一起,用於夾取工件。
(2)滾珠絲杆傳動:完成平移工作台左右移動
(3)工業導軌:輔助平移工作台左右移動
(4)電磁閥組:用於控製各個氣缸的升出、縮回動作。
(5)磁性傳感器:用於氣缸的位置檢測。當檢測到氣缸準確到位後將給PLC發出一個到位信號。(磁性傳感器接線時注意藍色接“-”,棕色接“PLC輸入端”)。
(6)單杆氣缸:由單向氣動電控閥控製。當氣動電控閥得電,氣缸縮回,同時塔吊臂下降與機械手爪組合完成工件的夾取。
(7)警示燈:係統上電、運行、停止信號指示。
(8)安裝支架:用於安裝提升氣缸及各個檢測傳感器。
(9)控製按鈕板:用於係統的基本操作、單機控製、聯機控製。
(10)電氣網孔板:主要安裝PLC主機模塊、空氣開關、開關電源、I/O接口板、各種接線端子等。
1.2、主要技術指標
(1)控製電源:交流220V
(2)PLC控製器:西門子
(3)電磁閥:4V110-06
(4)調速閥:出氣節流式
(5)磁性傳感器:D-C73L
(6)氣動手指:MHZ2-16D
(七)安裝單元
1、主要組成與功能
由吸盤機械手、搖臂部件、旋轉氣缸、料倉換位部件、工件推出部件、真空發生器、開關電源、可編程序控製器、按鈕、I/O接口板、通訊接口板、電氣網孔板、多種類型電磁閥及氣缸組成,主要完成選擇要安裝工件的料倉,將工件從料倉中推出,將工件安裝到位。
(1)吸盤機械手:用於真空原理吸取物料。
(2)搖臂部件:帶動吸盤機械手前後擺動。
(3)旋轉氣缸:搖臂部件的執行機構。
(4)料倉換位部件:用於黑白工件的選擇。
(5)工件推出部件:將黑白工件推出。
(6)磁性傳感器:用於氣缸的位置檢測。當檢測到氣缸準確到位後將給PLC發出一個到位信號。(磁性傳感器接線時注意藍色接“-”,棕色接“PLC輸入端”)。
(7)單杆氣缸1:由單向氣動電控閥控製。當氣動電控閥得電,氣缸伸出,進行料倉換位。
(8)單杆氣缸2:由單向氣動電控閥控製。當氣動電控閥得電,氣缸伸出,將黑白小工件推出。
(9)安裝支架:用於安裝提升氣缸及各個檢測傳感器。
(10)控製按鈕板:用於係統的基本操作、單機控製、聯機控製。
(11)電氣網孔板:主要安裝PLC主機模塊、空氣開關、開關電源、I/O接口板、各種接線端子等。
2、主要技術指標
(1)控製電源:直流24V/4.5A
(2)PLC控製器:西門子
(3)電磁閥:4V110-0624V
(4)調速閥:出氣節流式
(5)磁性傳感器:D-C73L
(6)單杆氣缸:CDJ2B16-60
(八)倉儲單元
1、主要組成與功能
由滾珠絲杠、滑杆推出部件、立體倉庫、步進電機、步進驅動器、電感傳感器、開關電源、可編程序控製器、按鈕、I/O接口板、通訊接口板、電氣網孔板、多種類型電磁閥及氣缸組成,主要完成按工件類型分類,將工件推入料倉。
(1)滑杆推出部件:用於將上站搬運過的物料推入相應的倉位裏。
(2)分類料倉:存儲機構。
(3)步進電機:分別控製X、Y兩軸滾珠絲杆完成倉儲位置選擇。
(4)步進驅動器:步進電機的執行機構。
(5)電感傳感器:用於X軸左限位。
(6)磁性傳感器:用於氣缸的位置檢測。當檢測到氣缸準確到位後將給PLC發出一個到位信號。(磁性傳感器接線時注意藍色接“-”,棕色接“PLC輸入端”)。
(7)單杆氣缸:由單向氣動電控閥控製。當氣動電控閥得電,氣缸伸出,同時將物料推出送至相應的倉儲位。
(8)安裝支架:用於安裝拖鏈及各個限位開關。
(9)控製按鈕板:用於係統的基本操作、單機控製、聯機控製。
(10)電氣網孔板:主要安裝PLC主機模塊、空氣開關、開關電源、I/O接口板、各種接線端子等。
2、主要技術指標
(1)控製電源:直流24V/4.5A
(2)PLC控製器:西門子
(3)步進電機:42J1834-810
(4)步進電機驅動器:二相驅動輸出,電流≥1A,細分≥12800步/圈
(5)電磁閥:4V110-06
(6)調速閥:出氣節流式
(7)磁性傳感器:D-C73L
(8)單杆氣缸:CDJ2B16-45
(9)限位開關:V-155-1C25
(10)電感傳感器:GKB-M0524NA
(九)視覺識別單元
一、基本要求:
1、工業視覺檢測係統包括相機、鏡頭、處理軟件、光源等組成。工業視覺檢測係統放置在輸送線一測,對工件進行顏色,尺寸,標識等信息檢測。
2、檢測結果通過總控通訊,為後續擺放等作業做好準備。
3、600 萬像素 1/1.8” CMOS 千兆以太網工業麵陣相機,傳感器類型CMOS、卷簾快門,傳感器型號 Sony IMX178,像元尺寸 2.4 µm × 2.4 µm,靶麵尺寸 1/1.8”,分辨率 3072 × 2048,動態範圍 71.3 dB,曝光時間 25 μs ~ 2.5 sec,快門模式 支持自動曝光、手動曝光、一鍵曝光模式,支持 Global Reset 和 Trigger Rolling功能,像素格式Mono 8/10/12 Bayer RG 8/10/10Packed/12/12Packed YUV422Packed,YUV422_YUYV_Packed RGB 8,BGR 8,數據接口 Gigabit Ethernet(1000Mbit/s)兼容 Fast Ethernet(100Mbit/s),數字 I/O 6-pin P7接頭提供供電和 I/O:1路光耦隔離輸入(Line0),1路光耦隔離輸出(Line1),
1 路雙向可配置非隔離 I/O(Line2)
4、鏡頭:鏡頭接口 C-Mount 外形尺寸 29 mm × 29 mm × 42 mm
5、連接電纜與支架
二、軟件要求
1、軟件可進行曝光時間,白平衡設置。
c.進行四點相機標定,能快速讀取標定模板的像素值,可獲取對應的位置值。
2、可進行日誌顯示,並可以清楚曆史日誌。
3、可進行至少8個模板匹配,即觸發1次拍照,匹配模板1,模板1匹配成功,發出模板1數據;若模板1未能匹配成功,視覺返回s1,0,0,0數據給機器人,機器人發命令繼續匹配模板;
f.可進行發送可接收數據顯示。
4、軟件輸出4個數據:類型、X、Y、旋轉量
h.支持繪製的模板可以進行集合運算;
i.繪製模板可以使用長方形,圓形,自由繪製等方式進行繪製模板;
5、在機器人視覺係統軟件中,拍照的圖像可以自由的拖動及放大;
k.支持實時采集及單獨拍照;
6、在機器人視覺係統軟件中,有紅色十字光標方便安裝調節相機位置。
(十)主控單元
1、主要組成與功能
采用了先進的總線控製方式,增配有主控PLC、工業觸摸屏、MCGS工業組態監控軟件,係統更加完整性,更能展現工業現場的工作狀態及現代製造工業的發展方向。
MCGS工業組態監控軟件:當八個站全部進入聯網狀態時,管理員能夠通過組態監控機中各種組態按鈕方便的控製整個係統的運行、暫停、繼續、停止等等;另外也可以控製單個站的運行、暫停、繼續、停止等等。每個站的工作狀態以及工件的材質、顏色等在監控畫麵上也能夠清楚的看到。
係統配置清單
|
序號 |
名稱 |
規格 |
數量 |
單位 |
備注 |
|
1 |
工作台 |
900mm×500 mm框架;橫槽鋁型材台麵;刹車腳輪;按鈕板安裝架;550*440*30mm網孔板 |
8 |
張 |
|
|
2 |
上料檢測單元 |
CPU 1214C AC/DC/繼電器(14路數字量輸入/10路繼電器輸出) |
1 |
套 |
|
|
3 |
搬運單元 |
CPU 1214C AC/DC/繼電器(14路數字量輸入/10路繼電器輸出) |
1 |
套 |
|
|
4 |
加工檢測單元 |
CPU 1214C DC/DC/DC;最大擴展模塊數量7;數字量輸入點數24;數字量輸出點數16; |
1 |
套 |
|
|
5 |
分揀單元 |
CPU 1214C DC/DC/DC;數字量輸入點數14;數字量輸出點數10;模擬量輸入點數2;模擬量輸出點數1;脈衝輸出2; |
1 |
套 |
|
|
6 |
傳送分揀單元 |
CPU 1214C AC/DC/繼電器(14路數字量輸入/10路繼電器輸出) |
1 |
套 |
|
|
7 |
機器人單元 |
CPU 1214C AC/DC/繼電器(14路數字量輸入/10路繼電器輸出) |
1 |
套 |
|
|
8 |
安裝單元 |
CPU 1214C AC/DC/繼電器(14路數字量輸入/10路繼電器輸出) |
1 |
套 |
|
|
9 |
分類倉儲單元 |
CPU 1214C DC/DC/晶體管(14路數字量輸入/10路晶體管型輸出) |
1 |
套 |
|
|
10 |
視覺識別單元 |
|
1 |
套 |
|
|
12 |
變頻器模塊 |
西門子V20 功率≥0.37KW |
1 |
台 |
|
|
13 |
觸摸屏模塊 |
TPC1061TI10.英寸,工業彩色觸摸屏。 |
1 |
套 |
|
|
14 |
電腦推車 |
鋼木結構,采用0.8~1.5mm的優質冷軋鋼板,表麵經酸洗處理,磷化防腐孩兒後靜電噴塑,表麵磨沙效果。台麵為防火、防水、耐磨高密度板 |
1 |
套 |
|
|
15 |
工件 |
大工件(三種)、小工件(兩種) |
1 |
套 |
|
|
16 |
配套工具 |
內六角扳手、活動扳手,萬用表、尖嘴鉗,一字起子、十字起子,鍾表螺絲刀、電鉻鐵,剪刀,鑷子,工具箱等 |
1 |
套 |
|
|
17 |
靜音氣泵 |
|
1 |
台 |
|
|
18 |
連接氣管 |
φ4/φ6 |
1 |
套 |
|
|
19 |
線纜及通訊線 |
|
1 |
套 |
|
|
20 |
說明書及軟件 |
|
1 |
套 |
|
十、主要配件
1、加工工件組:包括大工件(黑色、白色、金屬)三種、小工件(黑色、白色)兩種、廢工件 1種。工件組可多次組裝及拆卸。
2、配套提供實驗所需的設備說明書、實訓指導書及軟件使用說明書。
3、配套工具:
|
序號 |
名稱 |
數量 |
序號 |
名稱 |
數量 |
|
1 |
雙層專用工具箱 |
1 |
6 |
一字起子 |
1 |
|
2 |
內六角扳手 |
1 |
7 |
十字起子 |
1 |
|
3 |
活動扳手 |
1 |
8 |
鍾表綜合起子 |
1 |
|
4 |
30W電烙鐵 |
1 |
9 |
焊錫絲 |
1 |
|
5 |
數字式萬用表 |
1 |
|
|
|
4、靜音氣泵及連接氣管等
5、電腦台架:鋼木結構 1台
6、備品備件
|
序號 |
備品備件名稱 |
型號及規格 |
數量 |
|
1 |
氣動軟管 |
φ6 |
20米 |
|
2 |
三通接頭 |
φ6 |
5 |
|
3 |
單向節流閥 |
M5 |
5 |
|
4 |
單向節流閥 |
PT1/8” |
2 |
|
5 |
熔斷器 |
3A |
10 |
|
6 |
熔斷器 |
5A |
10 |
|
7 |
內六角螺絲 |
M6x16 |
10 |
|
8 |
內六角螺絲 |
M4x10 |
10 |
|
9 |
特製螺母 |
M6 |
5 |
|
10 |
大工件黑色、白色 |
|
各15 |
|
11 |
小工件黑色、白色 |
|
各15 |
十一、實訓內容
(一)實訓項目
1、傳感器應用技術實訓
該係統所使用的傳感器數量達四十多個,有電容式的、電感式的、光電式以及電磁式的,每一個都有著各自的特性、發揮著不同的作用,使係統得以可靠工作。學員可通過了解工作中各類傳感器的工作特性來加強對這些傳感器的感性認識,可使學員快速掌握所學知識。
2、氣動應用技術實訓
該係統上使用了大量的氣動元件,包括多種電控氣動閥、多種氣動缸、氣動夾爪、真空吸盤、真空發生器、過濾減速閥等。在學習這些氣動元件時,不但可以單獨學習每一種分離元件,而且還可以在學習時了解各種氣動元件之間,以及氣動元件與其它元件之間,如何配合起來並協調進行工作的。
3、PLC 編程實訓
柔性自動化實訓係統上八個單元,每個單元由一套PLC控製器單獨控製,這使得柔性自動化生產實訓裝置可以分成若幹完全獨立的工作機構,使十幾個學生可以同時進行學習,而且每個學員都有動手的機會。在該設備上學員不但可以學習PLC的各種技術,而且可以學習綜合科技環境下PLC的多種應用。為靈活學習和掌握PLC的各方麵知識提供了條件。
4、電氣控製電路實訓
柔性自動化實訓係統有八個工作單元,其電控部分全部按照工業標準和習慣進行設計,並且提供設計圖紙和說明書。學員在該設備上可學習電路原理圖分析、PLC各I/O地址查對和設備電路連線方法。
5、機械係統調試實訓
柔性自動化實訓係統上的八個工作單元相對獨立,在進行聯機調試時,學員需調整單元與單元之間的協調關係,至係統可正常、可靠地運行。這對提高在校學生動手能力有極大幫助。
6、係統維護和故障檢測技術實訓
設備日常維護的內容和方法,以及係統常見故障分析、排除的方法。
(二)工作任務
1.機器人結構設計
2.機電一體化係統設計
3.機械設計基礎
4.傳感器原理及應用
5.機器人感知與學習
6.機器視覺與人機交互
7.檢測與機器人傳感器技術
8.人工智能技術
9.智能機器人係統
10.機電一體化係統設計
11.機器人係統設計
12.機器人仿真技術
13.數字孿生技術與應用
14.智能製造係統設計
15.微處理器技術
16.機器人結構以及創新實踐
17.機器人建模與仿真
18.電機驅動與運動控製
19.視覺識別
20.機器人調試與維護
21.智能製造技術
上一個產品:MPS模塊式柔性自動化生產線實訓係統(五單元)
下一個產品:工業4.0智慧工廠上下料實訓裝置
工業機器人實訓設備最新產品
-
型號:TWB-QR12
品名:機電液一體化智能...
-

型號:TWB-QR11
-

型號:TWB-QR08型
品名:MPS模塊式柔性...
-

型號:TWB-QR09型
品名:模塊化環形生產線...
企業信息
您隻要致電:021-55884001(袁經理)
我們可以解答 MES網絡型模塊式柔性自動化生產線實訓設備 的相關疑問!
我們可以幫您推薦符合您要求的 MES網絡型模塊式柔性自動化生產線實訓設備 機電一體化 相關產品!
找不到所需產品?請點擊 產品導航頁
當前產品頁麵地址://m.yyh998.com/productshow-123-3275-1.html
630000.00
