聯係我們
聯係電話:021-55884002
聯係地址:上海市閔行區江凱路177號

每日一博
MPS模塊化柔性自動化生產線實訓係統 MPS模塊化柔性自動化生產線實訓係統實訓裝置由上料檢測站、機械手搬運站、自動加工站、安裝搬運站、分類站、5.7英寸觸摸控製屏、常用工具及備件箱等部分組成。...[詳情]
推薦產品
-

型號:TWSA-01
品名:電子工藝實訓平台
分類:電子工藝實訓教學設備
-

型號:TWB-801A
品名:柔性加工係統實訓...
分類:機電一體化實訓設備
-

型號:TWB-QR04
分類:工業機器人實訓設備
-

型號:TW-318C
品名:通用電工電子實驗...
分類:通用電工.電子教室


熱門產品
-

型號:TWT-WXGB
品名:高性能中級維修電...
分類:維修電工實訓考核
-
型號:TW-X32
品名:新型微機原理與接...
分類:實驗箱係列
-

型號:TW-QY37
品名:便攜式氣動傳動基...
分類:氣動液壓PLC實驗台
-

型號:TW-188G型
品名:電工電子電拖可編...
分類:電工電子技能實訓考核
工業機器人基礎工作站設備(ABB機器人係統)

- [產品分類]:工業機器人實訓設備
- [規格型號]:TWB-QR01
- [產品價格]:詢價
- [參數下載]:
- [聯係電話]:021-55884002
- [QQ]:
- [微信]:

- 已有 12096 人關注該產品

產品詳情

(圖片僅供參考、以實際配置為準)



車窗塗膠裝配操作模型零件碼垛操作模型



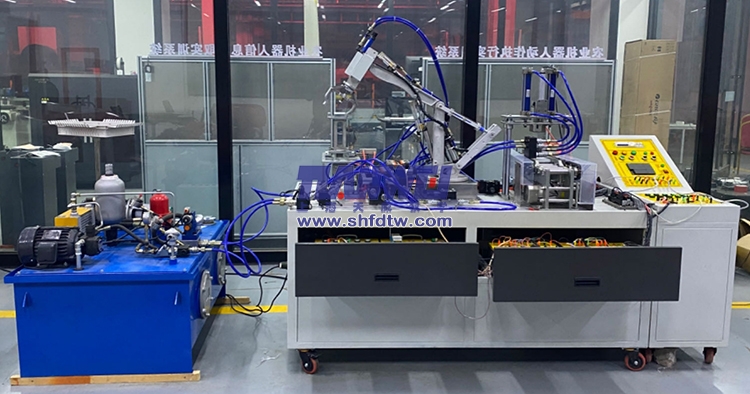
二、設備概述:
我公司經多方調研及深度校企合作研發出係列工業機器人應用與維護實訓考核係統設備。該係統符合“四個定位”:即職業技能競賽的定位;技能培訓與鑒定的定位;教學做一體化教學改革的定位;符合高技能人才培訓基地的定位;
該設備屬於基礎技能培訓應用設備,以6軸機器人為中心,根據任務要求配置不同任務載體,培養學生對機器人基礎知識的認知。任務模型的開發融入了趣味性與娛樂性,可以增加學員的學習興趣,通過不斷的重複訓練,強化學員對基本的點示教、直線、曲線等運動足跡的了解與掌握,學習精確點的定位及機器人運動路線選擇優化;使學生對機器人應用技術有初步了解與掌握。
該設備任務載體采用模塊化設計,具備獨立性、兼容性、可移植性等特點;並預留了擴展與升級的接口,根據市場需求進行不斷的開發升級或者學校用戶自行創新設計新的功能模塊。
三、技術參數:
1、工作電源:單相三線220V±5% 50HZ
安全保護:漏電保護,過流保護,短路保護
2、額定功率:≤2KW
3、環境溫度:-10~50℃
4、相對溫度:≤85%
5、外形尺寸:L2300mm×W2800mm×H1200mm
四、產品結構:
該設備主要由六軸工業機器人及底座、實訓平台、電氣控製板、軌跡訓練模型、工件裝配模型、檢測排列模型、車窗塗膠裝配模型、零件碼垛模型、圖塊搬運模型、物料存儲箱、工具收納牆、安全護欄、基礎雙吸盤夾具、基礎繪圖筆夾具、基礎車窗吸盤夾具、基礎抓手吸盤夾具及耗材包組成。
六軸工業機器人及底座:機器人采用實際工業應用的ABB機器人IRB120-3/0.58,有效負載3kg,臂展0.58米,配套工業緊湊型控製器,帶機器人控製軟件,底座由20mm厚鋼板焊接而成,堅固耐用。
視覺係統:工業級專用視覺相機與機器人配套專供、智能黑板相機、能檢測物料形狀輪廓、配套外置光源等。
實訓平台:平台支撐板采用2mm厚鋼材經過機械加工折彎成型,表麵噴塗處理;台麵采用520×266×15mm厚鋼板加工而成,表麵鍍鉻處理,間隔40×40mm開M4螺紋通孔,用於安裝不同任務模型;並在一側安裝電氣接口盒,提供一個急停按鈕用於緊急情況下使用,6位按壓式端子,使用於任務模型訓練的輸入/輸出接線,方便快捷,一路氣路輸出口及氣壓調節控製,可對訓練提供需要的氣源。
電氣控製板:操作麵采用透明有機玻璃,利用操作與觀察,並有350×400mm的區域用於資料與書籍擺放的人性化設計;麵板右側不鏽鋼板蝕刻處理,安裝有斷路器用於對設備電源的控製,急停按鈕可應急緊急情況的發生,轉換開關可對手動與自動之間切換,電源按鈕可控製設備啟停電路,16個鈕子開關用於手動狀態對機器人IO輸入的控製,16個LED指示燈顯示機器人運行狀態;背麵網孔板不鏽鋼把加工而成,用於安裝繼電器、開關電源等電器元件;整個控製板係統通過鋼架結構安裝在安全護欄的框架上,離地高度1米左右,符合身體操作。
軌跡訓練模型:不鏽鋼加工製造,通過在平麵、曲麵上蝕刻不同圖形規則的圖案(直線、圓形、三角形、五角星螺旋形等線條),以筆形繪圖夾具描繪圖形,訓練對機器人基本的點示教,直線、曲線運動足跡的掌握;
工件裝配模型:以一個固定在操作台工件為“主體工件”;機器人通過抓手或吸盤拾取“裝配工件”並把“裝配工件”精確裝配到“主體工件”內;而後機器人通過抓手或吸盤拾取“穿銷工件”並把“穿銷工件”從上至下穿入“主體工件”和“裝配工件”;或從側麵穿入“主體工件”和“裝配工件”內;“裝配工件”裝配到“主體工件”采用從上而下裝配,“穿銷工件”裝配有兩種方式,可以從上至下,也可以從側麵穿入;訓練對機器人精確定位及抓手吸盤夾具的學習。
檢測排列模型:車窗玻璃板原始存放在存儲倉內,玻璃板采用梯形設計,擺放裝置采用長邊插入,分為左右兩個方向,檢測台有光纖傳感器檢測玻璃板的長邊;機器人通過吸盤夾具拾取玻璃板到檢測台檢測,根據檢測判斷玻璃長邊選擇插入方向;依次循環; 吸盤夾具依次拾取汽車車窗玻璃板;訓練對機器人有不同結果選擇的精確定位應用技能
車窗塗膠裝配模型:塗膠機、汽車模型、車窗工件板分別固定到操作台上;機器人通過吸盤夾具拾取車窗工件板上汽車車窗;並對拾取車窗進行塗膠,完成後把車窗裝配到汽車上;而後拾取第二塊車窗,依次完成前窗、天窗、後窗的拾取、塗膠、裝配任務;練習對機器人點的示教、機器人運動軌跡選擇及與塗膠機的配合。
零件碼垛模型:鋁材加工氧化的物料擺放底板和碼垛底板固定到操作台;根據要求物料塊被擺放到擺放底板上,機器人通過吸盤夾具按要求拾取物料塊進行碼垛任務; 物料塊有長方形和正方形兩種,操作者可根據需要選擇擺放;可根據需要自由組合碼垛出多種形狀; 練習對機器人碼垛、陣列的理解並快速編程示教的應用技能。
圖塊搬運模型:多形狀物料搬運:機器人通過吸盤夾具依次把一個物料板擺放好的多種形狀物料(方形、圓形、五邊形、六邊形、五角星)拾取搬運到另一個物料板上;圓形物料搬運:機器人通過吸盤夾具依次把一個物料板擺放好的物料拾取搬運到另一個物料板上;物料板可以水平固定到操作台,也可傾斜一點角度安裝到操作台;圓形物料有兩種,一種金屬錢幣形物料,一種單麵錐形物料;每個物料板對應工位都蝕刻有物料編號;搬運形式可根據要求靈活組合,形式多樣,能滿足平麵、斜麵、陣列、指定編號位置、多種物料混合等要求;強化對機器人點位示教技能移訓練。
物料存儲箱:尺寸:700 mm×350 mm×450mm;內部分層存儲器件,每層有獨立拉手及支撐柱;最多可放3層,內襯采用海棉材料;外殼和內層板均采用ABS材料,模具一次成形;各箱子之間可層疊並方便扣鎖連成一體;隔層板每層承重20kg,整個箱體內置可承60kg,箱體外部可承130kg。
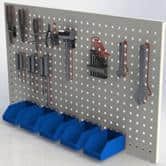
工具收納牆:2.0mm優質厚鋼網板製作而成,能固定於牆體上;有10多個工具位置,每個工具位置帶有定製目視化管理標識,用於存放各種工具及螺絲螺母等零件,形象直觀,存放方便,利於搬運,占用空間小,是工具零件存儲保管的理想載體。
安全護欄:隔離護欄,高1000mm,框架采用2mm厚灰色棟梁鋁合金型材,鋼化玻璃10mm厚;工作站全部通透利於觀察,玻璃中間沒有隔斷;並安裝一個側開門;門上安裝安全檢測元件,機器人自動運行必須在門關閉狀態下進行;係統工作站安裝有3個急停按鈕,分別位於操作控製台、模型安裝台、隔離護欄上,以備緊急情況使用。
基礎繪圖筆夾具:鋁材加工氧化處理,筆杆內空,可裝入筆芯進行繪製。
基礎雙吸盤夾具:鋁材加工氧化處理,能滿足玻璃板、物料塊(圓形、方形、五角星、五邊形、六邊形、)、半球形、長條形物料等多種物料的拾取,做到多個任務夾具通用。
基礎車窗吸盤夾具:鋁材加工氧化處理,能滿足汽車模型玻璃窗、玻璃板、物料塊(圓形、方形、五角星、五邊形、六邊形、)、半球形物料等多種物料的拾取,做到多個任務夾具通用。
基礎抓手吸盤夾具:鋁材加工氧化處理,集成抓手與吸盤兩種功能,能對多種物料進行處理,學員可根據要求選擇一種方式或兩種方式同時使用,滿足教學多樣性及自主選擇性。
五、產品特點:
1.開放式設計:可根據實訓內容選擇機器人使用夾具及載體模型;並根據學員意願選擇在實訓平台的安裝位置及方向;且具有很好的延伸型,客戶可根據自己的需求開發新模型及夾具。
2.模具化運用:所有模型及夾具全部裝入一次開模製作的物料存儲箱內,使用保存方便快捷,節約空間,便於管理。
六、設備配置及參數
主控台
一、功能、參數及特點描述
1、8路獨立控製電源提供設備與主控台供電,具有過流、短路等保護功能;主控台麵板采用薄膜按鍵工藝,操作安全方便;2、工作室投影屏幕、窗簾采用分路控製,具備升降控製功能,伺服電機驅動,並能在操作台操縱;
3、視頻網絡係統配備多個高清攝像頭及大容量硬盤錄像機,全麵監控教室的當前狀態;
4、視頻展示台折疊式存放,在不占用外部空間的前提下為教學和演示提供方便;
5、安裝多種軟件的計算機係統配和多媒體控製係統可以滿足多種教學服務;主控台配置的常用的USB2.0(2個)和VGA(四進一出)多功能接口為教學提供了便捷;
6、主控台可以和學生機組成網絡係統,便於教學管理,也可接入其他網絡實現遠程監控操作的管理目的;
7、尺寸:2800mm×1200mm×1100mm (長×寬×高)
二、單套配置(1套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
電源控製板 |
8路獨立,短路、過流保護 |
套 |
1 |
|
2 |
框架 |
鈑金加工 |
套 |
1 |
|
3 |
電腦主機 |
聯想,安裝相應軟件 |
台 |
1 |
|
4 |
顯示器 |
聯想 19寸 |
台 |
2 |
|
5 |
投影幕 |
120寸 |
台 |
1 |
|
6 |
投影機 |
NEC NP430C |
台 |
1 |
|
7 |
高清攝像頭 |
WA-703A |
台 |
4 |
|
8 |
硬盤錄像機 |
DS-7204HV-ST海康 500G |
台 |
1 |
|
9 |
視頻展示台 |
JH—6300 |
台 |
1 |
|
10 |
功放機 |
D-168 |
台 |
1 |
|
11 |
音響 |
10" 威多爾K-10 200W |
台 |
2 |
|
12 |
話筒 |
座式 |
台 |
1 |
|
13 |
交換機 |
TL-SF1048S |
台 |
1 |
|
14 |
授課椅 |
五輪轉椅 |
台 |
1 |
|
15 |
示教講台 |
6M² |
套 |
1 |
機器人係統
一、功能、參數及特點描述
1、ABB機器人IRB120-3/0.58,有效負載3kg,臂展0.58米,配套工業緊湊型控製器,帶機器人控製軟件;
2、底座由20mm厚鋼板焊接而成;
3、控製器220V電源,本體到控製器3~7m長電纜;
4、示教器具中文操作界麵,本體到示教器3~7m長線纜;
5、帶DC24V 16in/16out IO卡;
6、集成視覺監控軟件係統
7、遠程機器人係統備份與恢複功能;
8、具有自動工具重量與載荷檢測設定功能;
9、在機器人使用壽命內,使用機器人離線軟件進行實時程序、IO、機器人3D動態動作監控;
10、具有機器人全壽命保養自動維護檢測係統功能;
11、具有電池電量環保節省功能;
12、機器人控製係統原配固態存儲器容量1G,並支持USB擴展為副存儲器;
13、具有機器人運動軌跡實時微調功能;
14、提供終身機器人係統功能升級。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
機器人 |
IRB120-3/0.583公斤 |
套 |
1 |
|
1) |
本體 |
3公斤,580mm行程半徑 |
台 |
1 |
|
2) |
控製器 |
220V電源,本體配套 |
個 |
1 |
|
3) |
IO卡 |
24V ,16輸入/16輸出 |
個 |
1 |
|
4) |
視覺軟件 |
內置集成 |
套 |
1 |
|
5) |
軟件光盤 |
機器人光盤 |
個 |
1 |
|
2 |
機器人底座 |
鋼板焊接 |
台 |
1 |
三、圖片

操作控製係統板
一、功能、參數及特點描述
1、操作麵采用透明有機玻璃,利於觀察,並有不小於350mm×300mm的空白區域用於存放資料;
2、操作控製區可進行電源控製,配漏電開關、急停按鈕、手動/自動轉換開關、鈕子開關、LED指示燈,有漏電保護、過流保護、緊急停止等保護功能;
3、16個鈕子開關用於手動操作,與機器人輸入信號連接,便於手動控製機器人運行;
4、16個LED燈與機器人輸出信號連接,直觀指示機器人運行輸出狀態;
5、內部安裝多個ABB繼電器用於機器人手動自動切換等功能;開關電源為設備運行提供必要的控製電源。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
交流接觸器 |
CJX2-2510 220V |
個 |
1 |
|
2 |
開關電源 |
24V 3.5A |
個 |
1 |
|
3 |
急停按鈕 |
HB22-11TS,Φ22(自鎖旋放)紅 |
個 |
1 |
|
4 |
旋鈕式按鈕開關 |
NP2-BD,Φ22/黑/二位置 |
個 |
2 |
|
5 |
鈕子開關 |
MTS-102 |
個 |
16 |
|
6 |
斷路器 |
DZ47-60/3P |
台 |
1 |
|
7 |
繼電器 |
CR-M024DC4L |
個 |
8 |
|
8 |
指示燈線路板 |
16個LED指示燈 |
套 |
2 |
|
9 |
按鈕麵板 |
S304(蝕刻) |
塊 |
1 |
|
10 |
網板 |
電氣件安裝 |
塊 |
1 |
|
11 |
操作區 |
有機玻璃全透明 |
套 |
1 |
|
12 |
模數化插座 |
|
個 |
2 |
三、圖片

操作對象承載平台
一、功能、參數及特點描述
1、鋼製支撐架,弧形設計,用於地麵固定於台麵安裝模型;
2、鋼製台麵底板,厚度12mm,表麵鍍鉻處理,具有40×40mm網格 M4螺紋安裝孔,可牢靠安裝多種工作對象;
3、另配電氣接口盒,1路氣路控製接口、1個急停按鈕及1個模型信號接口。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
台麵底板 |
鋼製(渡鉻),模型安裝 |
件 |
1 |
|
2 |
急停按鈕 |
HB22-11TS,Φ22(自鎖旋放)紅 |
個 |
1 |
|
3 |
隔板直通接頭 |
J-KJE06-00 |
個 |
1 |
|
4 |
可調單向節流閥模塊 |
ASC100-06 |
個 |
1 |
|
5 |
螺紋直通接頭 |
APC6-01 |
個 |
2 |
|
6 |
按壓式端子 |
|
個 |
2 |
|
7 |
支撐架 |
鋼製加工 |
套 |
1 |
|
|
|
|
|
三、圖片

繪圖筆夾具
一、功能、參數及特點描述
鋁材加工氧化處理,筆杆內空,可裝入筆芯進行繪製;可安裝到機器人上;用於軌跡訓練模型夾具使用。
二、單套配置(9套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
筆夾 |
鋁製,加工氧化 |
個 |
1 |
|
2 |
筆杆 |
鋁製,加工氧化 |
個 |
1 |
|
3 |
筆頭 |
黃銅,加工 |
個 |
1 |
|
4 |
安裝板 |
鋁製,加工氧化 |
個 |
1 |
|
|
|
|
|
三、圖片

抓手吸盤夾具
一、功能、參數及特點描述
鋁材加工氧化處理,集成抓手與吸盤兩種功能,能對3種物料進行處理,學員可根據要求選擇一種方式或兩種方式同時使用,滿足教學多樣性及自主選擇性。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
真空吸盤 |
ZPT06BN-A5 |
個 |
2 |
|
2 |
氣手指 |
MHZ2-6D |
個 |
1 |
|
3 |
微型接頭 |
M-3ALU-4 |
個 |
2 |
|
4 |
真空發生器 |
ZH07BS-06-06 |
個 |
2 |
|
5 |
變徑直接頭 |
KJH04-06 |
個 |
2 |
|
6 |
機加件 |
鋁製,加工氧化 |
批 |
1 |
三、圖片

雙吸盤夾具
一、功能、參數及特點描述
鋁材加工氧化處理,能滿足玻璃板、(圓形、方形、五角星、五邊形、六邊形、)物料塊、球形物料等多種物料的吸取,做到多個任務夾具通用;
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
真空吸盤 |
ZPT10UN-A5 |
個 |
2 |
|
2 |
直通接頭 |
KQ2F06-M5A |
個 |
2 |
|
3 |
真空發生器 |
ZH07BS-06-06 |
個 |
2 |
|
4 |
機加件 |
鋁製,加工氧化 |
批 |
1 |
三、圖片

描圖操作對象
一、功能、參數及特點描述
不鏽鋼加工製造,通過在平麵、曲麵上蝕刻不同圖形規則的圖案,以筆形繪圖夾具描繪圖形,訓練對機器人基本的點示教,直線、曲線運動足跡的掌握;學習點的定位及機器人運動路線選擇優化。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
鋼加工件 |
鋼製,焊接加工 |
件 |
1 |
|
2 |
蝕刻菲林 |
蝕刻工藝 |
件 |
1 |
|
|
|
|
|

工件裝配操作對象
一、功能、參數及特點描述
1、以一個固定在操作台工件為主體“工件3”;
2、機器人通過抓手或吸盤拾取“工件1”並把“工件1”精確裝配到主體“工件3”內;
3、機器人通過抓手或吸盤拾取“工件2”並把“工件2”從上至下穿入“工件1”和“工件3”;或從側麵穿入“工件1”和“工件3”內;
4、“工件1”裝配到“工件3”采用從上而下裝配,“工件2”裝配有兩種方式,可以從上至下,也可以從側麵穿入;
5、訓練對機器人精確定位及抓手吸盤夾具的學習。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
主體工件 |
鋁製,加工氧化 |
件 |
1 |
|
2 |
放置板 |
鋁製,加工氧化 |
件 |
1 |
|
3 |
物料1 |
黑色PVC加工 |
件 |
1 |
|
4 |
物料2 |
白色PVC加工 |
件 |
1 |
|
|
|
|
|
三、圖片


車窗塗膠裝配操作對象
一、功能、參數及特點描述
1、塗膠機、固定汽車模型、車窗工件板分別固定到操作台上;
2、機器人通過吸盤夾具到車窗工件板拾取汽車車窗;對拾取車窗到塗膠機進行塗膠,完成後把車窗裝配到汽車上;而後拾取第二塊車窗,依次完成前窗、天窗、後窗的拾取、塗膠、裝配任務;
3、練習對機器人點的示教、機器人運動軌跡選擇及與塗膠機的配合。
二、單套配(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
兩位三通先導式電磁閥 |
SYJ512-5LZD-M5 |
個 |
1 |
|
2 |
汽車模型 |
BMWGT535I 1:32黑色 |
台 |
1 |
|
3 |
真空發生器 |
ZH07BS-06-06 |
個 |
1 |
|
4 |
Y型三通 |
KJU06-00 |
個 |
1 |
|
5 |
L接頭 |
KQ2L06-M5 |
個 |
3 |
|
6 |
機加件 |
鋁製,加工氧化 |
批 |
1 |
三、圖片

零件碼垛操作對象
一、功能、參數及特點描述
1、鋁材加工氧化的物料擺放底板和碼垛底板固定到操作台;
2、根據要求物料塊被擺放到擺放底板上,機器人通過吸盤夾具按要求拾取物料塊進行碼垛任務;
3、物料塊有長方形和正方形兩種,操作者可根據需要選擇擺放;可根據需要自由組合碼垛出多種形狀;
4、練習對機器人碼垛、陣列的理解並快速編程示教的強化訓練。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
零件碼垛物料托盤 |
鋁製,加工氧化 |
件 |
2 |
|
2 |
零件碼垛物料1 |
POM(白、紅、藍、黑),機械加工 |
件 |
24 |
|
3 |
零件碼垛物料2 |
POM(白、紅、藍、黑),機械加工 |
件 |
48 |
圖塊搬運操作對象
一、功能、參數及特點描述
1、多形狀物料搬運:機器人通過吸盤夾具依次把一個物料板擺放好的多種形狀物料(方形、圓形、五邊形、六邊形、五角星)拾取搬運到另一個物料板上;
2、圓形物料搬運:機器人通過吸盤夾具依次把一個物料板擺放好的物料拾取搬運到另一個物料板上;物料板可以平放固定到操作台,也可安裝斜麵固定架安裝到操作台;圓形物料有兩種,一種兩麵金屬錢幣形物料,一種單麵錐形物料;
3、每個物料板對應工位都蝕刻有物料編號;
4、搬運形式可根據要求靈活組合,形式多樣,能滿足平麵、斜麵、陣列、指定編號位置、多種物料混合等要求;
5、強化對機器人點位移訓練與理解。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
圖塊搬運物料托盤1 |
鋁製(蝕刻號碼)加工氧化 |
件 |
2 |
|
2 |
圖塊搬運物料托盤2 |
鋁製(蝕刻號碼)加工氧化 |
件 |
2 |
|
3 |
圖塊物料1 |
POM(白)機械加工 |
件 |
16 |
|
4 |
圖塊物料2 |
POM(五角、五邊、六邊、四邊、圓形)機械加工 |
件 |
20 |
|
5 |
托盤支架 |
鋁製 加工氧化 |
件 |
2 |
三、圖片


檢測排列操作對象
一、功能、參數及特點描述
1、車窗玻璃板原始存放在存儲倉內,玻璃板采用梯形設計,擺放裝置采用長邊插入,分為左右兩個方向,檢測台有光纖傳感器檢測玻璃板的長邊;
2、機器人通過吸盤夾具拾取玻璃板到檢測台檢測,根據檢測判斷玻璃長邊選擇插入方向;依次循環。 吸盤夾具依次拾取汽車車窗玻璃板;
3、訓練對機器人有不同結果選擇的精確定位。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
光纖放大器 |
D10BFP |
個 |
1 |
|
2 |
光纖 |
PBT46U |
個 |
1 |
|
3 |
檢測模型物料 |
藍色透明有機玻璃 |
件 |
8 |
|
4 |
機加件 |
鋁製加工氧化 |
批 |
1 |

零件箱
一、功能、參數及特點描述
1、零件箱采用尺寸:700 mm×350 mm×450mm
2、內部可分層存儲器件,每層有獨立拉手及支撐柱,內襯采用海棉材料;
3、外殼和內層板均采用ABS材料,模具一次成形;
4、各箱子之間可層疊並方便扣鎖連成一體;
5、隔層板每層承重20kg,整個箱體內置可承60kg,箱體外部可承130kg。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
箱體 |
灰色, 2.0mm厚ABS材料 700*350*450mm |
件 |
1 |
|
2 |
箱體拉手 |
藍色,ABS材料 |
件 |
1 |
|
3 |
箱蓋鎖扣 |
藍色,ABS材料 |
件 |
4 |
|
4 |
箱體鎖扣 |
藍色,ABS材料 |
件 |
2 |
|
5 |
隔層板 |
ABS材料,2.0mm厚 |
套 |
1 |
|
6 |
層板拉手 |
藍色,ABS材料,與隔層板配套 |
套 |
1 |
|
7 |
內襯 |
硬泡沫,與裝模型配套 |
套 |
1 |


隔層 箱體
工具收納牆
一、功能、參數及特點描述
1、2.0mm優質厚鋼網板製作而成,能固定於牆體上;
2、有10多個工具位置,每個位置帶有定製目視化管理標識;
3、用於存放各種工具及螺絲螺母等零件,形象直觀,存放方便,利於搬運,占用空間小,是工具零件存儲保管的理想載體;
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
掛板 |
鋼製加工、絲印,目視化管理 |
件 |
1 |
|
2 |
工具架 |
擺放工具 |
批 |
1 |
|
3 |
工具 |
與掛板配套 |
批 |
1 |
安全控製係統
一、功能、參數及特點描述
1、隔離護欄,總體高1200mm,框架采用2mm厚灰色鋁合金材料,其他全部安裝10mm厚透明鋼化玻璃;帶一個側開門,左右推拉式,占地2000~2300mm×2000~2300mm;
2、係統工作站安裝有3個急停按鈕,分別位於操作控製台、模型安裝台、隔離護欄上,以備緊急情況使用;
3、在隔離護欄、安全門、設備等顯眼位置粘貼多種安全標識,實時提醒設備的安全運行。
二、單套配置(6套)
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
急停按鈕 |
HB22-11TS,Φ22(自鎖旋放)紅 |
個 |
1 |
|
2 |
急停按鈕盒 |
安裝急停按鈕 |
件 |
1 |
|
3 |
鋁製線槽 |
50*50 |
米 |
12 |
|
4 |
鋁製線槽 |
40*30 |
米 |
9 |
|
5 |
固定框 |
3.0厚鋁型材 |
米 |
25 |
|
6 |
玻璃 |
鋼化清玻,10mm |
平方米 |
36 |
|
7 |
導軌 |
U型導軌 |
套 |
1 |
|
8 |
安全標示 |
|
套 |
1 |

空氣壓縮機
一、功能、參數及特點描述 靜音 12L 2套
使用說明書
一、描述與設備配套 6套
教材
一、描述
1、與設備配套典型工作任務工學結合工作頁1本。
2、主流品牌工業機器人基礎教材1本。 7套
討論區
一、配置 1套
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
學習桌 |
1400*450*750mm |
套 |
4 |
|
2 |
四腳椅 |
長630mm*寬630mm*高910mm |
套 |
8 |
一、配置 1套
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
電腦桌 |
1400×600×780mm |
套 |
6 |
|
2 |
四腳椅 |
長630mm*寬630mm*高910mm |
套 |
6 |
|
3 |
台式電腦 |
聯想 |
套 |
6 |
|
4 |
網絡交換機 |
8口 |
個 |
1 |
|
5 |
文件櫃 |
900*400*1800 |
台 |
1 |
一、功能、參數及特點描述 1套
|
序號 |
名稱 |
規 格 |
單位 |
數量 |
|
1 |
消防器材 |
370*200*高550mm |
套 |
1 |
|
2 |
醫藥箱 |
280*110*280mm |
套 |
1 |
|
3 |
耗材回收桶 |
60L 綠色 |
個 |
1 |
|
4 |
垃圾桶 |
60L 灰色 |
個 |
1 |
|
5 |
掃把 |
1100*270*230mm |
把 |
2 |
|
6 |
灰鬥 |
1100*270*230mm |
個 |
2 |
|
7 |
平地拖把 |
600*150mm 拖把絲為超細纖維 |
把 |
2 |
|
8 |
工學結合管理建設 |
劃線、定位、標識等 |
套 |
1 |

七、可開設的主要實訓項目:
1、工業機器人的基本認識。
2、工業機器人示教器運動操作。
3、工業機器人的點位示教。
4、工業機器人基本參數設置。
5、工業機器人基本運動指示學習。
6、工業機器人基於示教器的程序編輯。
7、工業機器人IO控製應用。
8、工業機器人基本接線方法。
9、簡單軌跡運行編程與示教。
10、平麵圓形描圖任務編程與示教。
11、平麵矩形描圖任務編程與示教。
12、曲麵圓形描圖任務編程與示教。
13、曲麵矩形描圖任務編程與示教。
14、固定位置搬運編程與示教。
15、平麵位置搬運裝配編程與示教 。
16、斜麵位置搬運裝配編程與示教 。
17、平麵矩陣立體碼垛編程與示教。
18、模型車窗塗膠裝配編程與示教。
19、汽車玻璃檢測與分類排列的編程與示教。
20、固定位置搬運編程與示教;
21、玻璃板檢測與分類排列的編程與示教;
22、工業機器人與抓手夾具配合是應用;
23、工業機器人與吸盤夾具配合是應用;
1.3 工業機器人基本技能工作室“資訊區”建設
① 概述
該區域主要為學員提供相關專業性資料,以及網絡資訊查詢等配置,在一體化一體化教學中,需要充分發揮學員的自主學習精神,並由工作頁的指引,讓學員熟練運用各種資訊查詢和搜索手段,逐步形成自行解決問題的習慣和方法。
② 配置
書櫃、電腦桌、計算機、world wild web係統、LAN網絡、工具書籍、專業書籍、傳統教材、椅子、文具等



資訊區實例照片(圖片僅供參考、以實際配置為準)
1.4 工業機器人基本技能工作室“討論區”建設
① 概述
當一體化教學深入開展後,在教學任務執行的過程中,學員團隊可進入討論區進行項計劃與規劃、實施方案、人員分工、進度製作、調試方式等具體實施情況的討論與分析,完全接近企業實際生產過程中的產前任務分析及生產過程中的變更集體討論,充分鍛煉學員的團隊意識。
② 配置
會議桌、會議椅、書架、基本文具、寫字板等



討論區實例照片(圖片僅供參考、以實際配置為準)
1.5 工業機器人基礎技能工作室“一體化係列教材”建設
根據人力資源與社會保障部《技工院校一體化教學改革試點工作方案》的要求,經教研室專家和工程師的探索和研究,最終確定統一意見,即開發編寫任務引領、項目驅動和模塊化教學,以學生為中心的新型“工作頁”式教材學材,並根據相關職業特性結合了工作任務載體、專業技能知識、實際工作流程和綜合評價體係,按照工作過程的順序和學生自主學習的要求進行任務內容和評價標準的編排,最終將由勞動出版社出版成正式在冊教材。

一體化教材編寫研討會

一體化教學任務工作流程
上一個產品:已經沒有了
下一個產品:工業機器人技術應用平台方案
工業機器人實訓設備最新產品
-
型號:TWB-QR12
品名:機電液一體化智能...
-

型號:TWB-QR11
-

型號:TWB-QR10型
品名:MES網絡型模塊...
-

型號:TWB-QR08型
品名:MPS模塊式柔性...
企業信息
您隻要致電:021-55884001(袁經理)
我們可以解答 工業機器人基礎工作站設備(ABB機器人係統) 的相關疑問!
我們可以幫您推薦符合您要求的 工業機器人基礎工作站設備(ABB機器人係統) 相關產品!
找不到所需產品?請點擊 產品導航頁
當前產品頁麵地址://m.yyh998.com/productshow-123-2285-1.html
450000.00
