









TWB-QR02工業機器人拆裝與調試實訓台
一、方案簡介
平台選用先進的六關節機器人,由機器人本體裝調平台與電氣維護平台組成。機器人本體裝調平台可以拆卸到螺絲級,是學生對工業機器人核心部件和機械結構的認知平台,從內部構成理解工業機器人的運動方式和動力傳遞。讓學生可掌握:機器人本體結構認、諧波減速器安裝與維護、常用安裝工具使用、機器人基本術語與圖形符號、機器人零位調試、機器人精度測試、機器人典型維護操作。
機器人電氣維護平台,是把電氣櫃各大部件拆散安裝在網孔架上,清晰體現機器人電氣連接原理。讓學生可掌握:電氣器件認知、電氣原理學習、電氣故障排除與維護。
裝配完成的機器人本體,在電控櫃的驅動下,能實際完成應用操作。通過選購模塊,可實施機器人基礎示教編程(軌跡坐標訓練模塊)、基礎工藝編程(碼垛模塊)。
平台配套提供三維拆裝軟件(RobotAC),3D真實重現了機器人本體拆裝與電氣維護平台功能。RobotAC可完成大部分硬件平台上的實訓項目。
本平台適合職業院校、高校的工業自動化類相關專業,《工業機器人安裝與調試》、《工業機器人係統維護》等課程的實訓教學,也適合工業機器人安裝調試技能比賽。
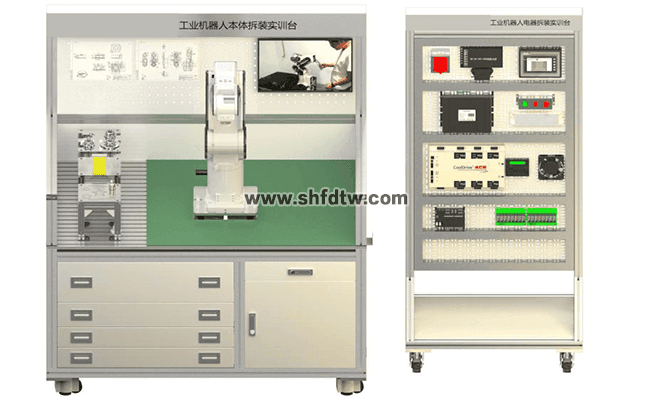
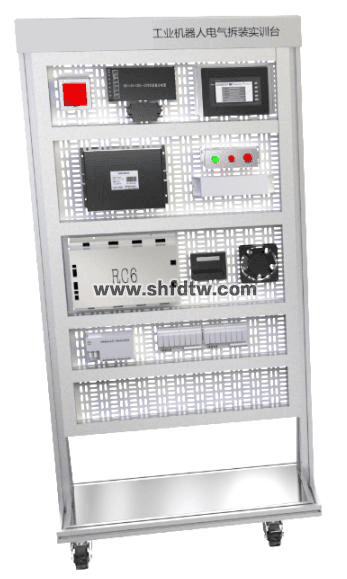
工業機器人拆裝與調試實訓台效果圖
企業信息
您隻要致電:021-55884001(袁經理)
我們可以解答 工業機器人拆裝與調試實訓台 的相關疑問!
我們可以幫您推薦符合您要求的 工業機器人拆裝與調試實訓台,機器人拆裝實驗台,可拆裝工業機器人實訓係統,機器人拆裝實訓設備 相關產品!
找不到所需產品?請點擊 產品導航頁
當前產品頁麵地址://m.yyh998.com/productshow-123-2606-1.html
二、技術參數
(1)產品尺寸:
機器人本體裝調平台:長1500mm*寬1000mm*高1500mm
電氣維護平台:長800mm*寬500mm*高1600mm
(2)工作電源:單相三線製 AC220V±5% 50HZ
(3)安全保護:漏電保護,過流保護,短路保護
(4)額定功率:≤2KW
三、產品特點:
1、工業機器人本體裝調
采用工業級機器人,金屬剛體,可拆解到螺絲級,可反複拆裝練習。
2、電氣常見拆裝
把工業級的機器人電氣櫃的大部件拆散安裝在網孔架上,清晰體現機器人電氣連接原理。
3、機器人故障維護
不僅讓學習掌握機器人安裝與調試,還提供機器人日常應用的典型維護。
4、三維仿真軟件
按真實工業機器人1:1開發的虛擬仿真拆裝機器人,方便學生在電腦上反複練習而會損壞硬件。三維仿真軟件“學、練、考”對由學生自主學習,並自動考核。
5、豐富教學資源
提供課程標準、項目化的教材、真人操作視頻。
四、機器人本體拆裝與調試平台主要組成
1、本體拆裝台
外形尺寸約為1500×1000×1600mm。工作台板采用工業鋁型材拚接搭建,台麵上布有T型槽,通過M6快速拆卸的T型螺母和彈簧螺母塊安裝不同模塊。機台上有機器人裝調區和基礎實訓擴展區。機器人裝調區上有一個安裝平台,該平台可以360°旋轉和固定,這樣安裝人員可以在固定位置對機器人無死角安裝。擴展區可以安裝基礎實訓模塊、搬運碼垛模塊等。平台的背板可裝夾機器人安裝工藝文件。
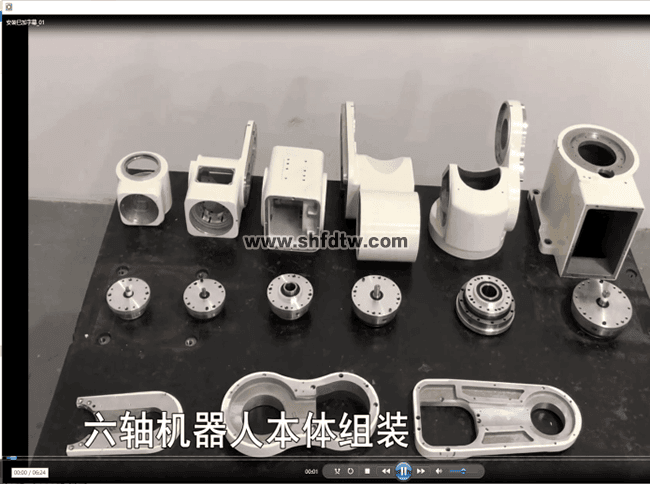
2、本體散件部件
機器人本體散件都包裝好放在對應抽屜裏,主要包括鋼體、減速機、電機、本線內線、拖地線、線環、各種小配件等。
3、機器人本體
裝配完成後,本體如下:

本體
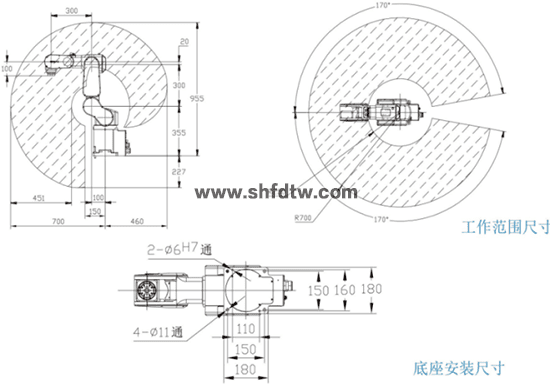
本體參數如下:
|
型號 |
VR6-S1 |
|
|
動作自由度 |
6 |
|
|
負載 |
6kg |
|
|
工作範圍 |
700mm |
|
|
手腕法蘭麵 |
800mm |
|
|
範圍 |
J1 |
±170° |
|
J2 |
-60°~+160° |
|
|
J3 |
-65°~+210° |
|
|
J4 |
±180° |
|
|
J5 |
±135° |
|
|
J6 |
±360° |
|
|
運動速度 |
J1 |
444°/s |
|
J2 |
444°/s |
|
|
J3 |
444°/s |
|
|
J4 |
441°/s |
|
|
J5 |
441°/s |
|
|
J6 |
706°/s |
|
|
重複定位精度 |
±0.02mm |
|
|
本體重量 |
<30kg |
|
|
電源電壓 |
220V |
|
|
能耗 |
1.0KW |
|
|
安裝方式 |
地麵安裝,支架安裝,倒置安裝 |
|
|
應用 |
裝配、物料搬運等 |
|
|
本體防護等級 |
IP65 |
|
|
電控櫃防護等級 |
IP43 |
|
|
用戶接線 |
IO接口8芯,氣動接線2*Φ4mm |
|
4、拆裝工具套件
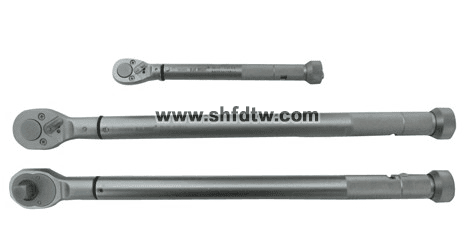
預置式扭力扳手

內六角扳手
預置式扭力扳手具有預設扭矩數值和聲響裝置。當緊固件的擰緊扭矩達到預設數值時,能自動發出訊號“卡嗒”(click)的一聲,同時伴有明顯的手感振動,提示完成工作。解除作用力後,扳手各相關零件能自動複位。精確度符合ISO6789:1992.ASMEB107.14,GGG-W-686.±4%。
5、測量百分表
百分表是利用精密齒條齒輪機構製成的表式通用長度測量工具。通常由測頭、量杆、防震彈簧、齒條、齒輪、遊絲、圓表盤及指針等組成。把百分表安裝在機器人J6法蘭上,通過機器人的不同位置的循環運動,可快速的測試機器人重複精度。

6、基礎示教編程模塊
基礎示教編程模塊是一個可選配模塊。機器人調試完成後,達到出廠精度,可通過示教器的示教與編程,掌握機器人各種坐標,軌跡運動操作。
基礎示教編程模塊采用銀色鋁合金材質,包含:TCP標定;直線、圓弧、曲線軌跡訓練;坐標係統標定。
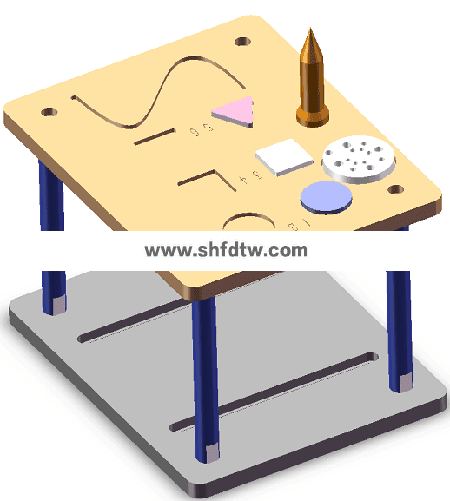
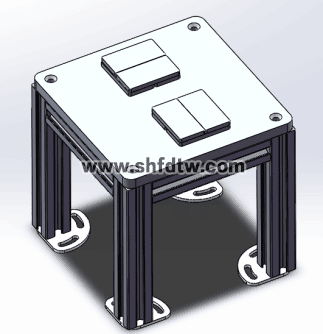
7、基礎工藝編程模塊
人基礎示教編程(軌跡坐標訓練模塊)、基礎工藝編程(碼垛模塊)。
機器人的工藝應用有多種,本模塊通過碼垛操作,掌握碼垛算法的原理,以及通過示教教的調試技巧。
碼垛模塊采用銀色鋁合金材質,包含:碼垛底板,不同大小的碼垛工件。
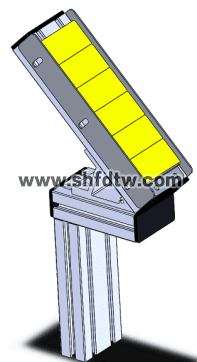
自動落料機構
碼垛平台效果圖
五、機器人電控維護平台主要組成
1、網孔架
把工業機器人的電氣櫃各大部件拆散安裝在網孔架上,清晰體現機器人電氣連接原理。主要部件有:電源、濾波器、機器人運動控製器、伺服驅動器、示教器、擴展IO。同進時還有一個故障設置模塊,通過人機界麵操作可以設置典型的故障,並通過人機界麵設置解除故障。
2、機器人運動控製器
運動控製器作為機器人的核心部分,是影響機器人性能的關鍵部分之一。工業機器人控製係統的主要任務是控製機器人在工作空間中的運動位置、姿態和軌跡,操作順序及動作的時間等。它同時具有編程簡單、軟件菜單操作、友好的人機交互界麵、在線操作提示和使用方便等特點。本運動控製器的特點:
1)采用x86硬件平台,高性能硬件,豐富的外圍接口,方便外設擴展;
2)采用實時Linux操作係統。實時性強,軟件開發方便;
3)支持EtherCAT協議,作為主站功能,通過網絡實現對伺服模塊與IO模型管理;
4)模塊化軟件開發,不同的子任務由不同的功能模塊實現 ,以利於修改、添加、配置功能;
5)內置了16輸入16輸出的IO模塊;
6)支持二次開發,方便功能擴展。
機器人運動控製器接口如下:
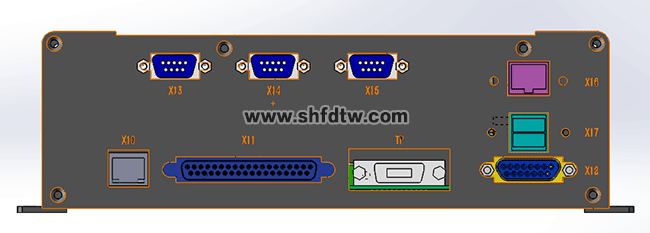
X10:EtherCAT主站輸出,RJ45口
X11:內置IO模型輸出,16輸入16輸出
TP:示教器接口;
X12:係統信號接口
X17:USB擴展口
X16:管理網口,RJ45
X13:RS232接口
X14:RS232接口
X15:RS485接口
3、機器人示教器
示教器采用8寸觸摸屏,顯示分辨率1026*768。示教器上有物理鍵盤,方便快捷編寫程序,至少有:26個字母鍵,通過切換鍵與數字及特殊符號切換、4個方向鍵、10個功能健、8組軸操作鍵,每組至少有+與-鍵。共不少於76物理按鍵。示教器接口說明:

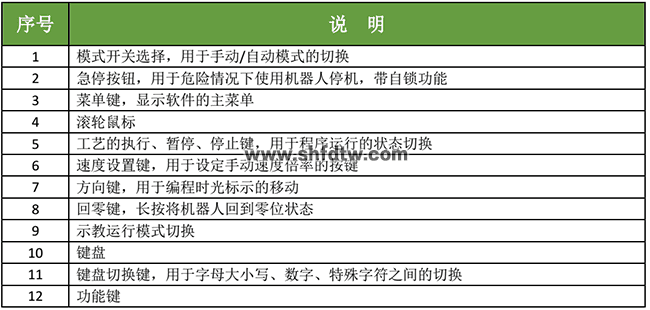
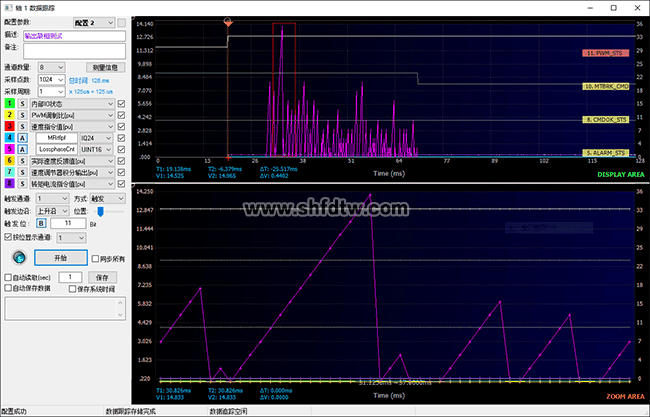
示教器能實時采集機器人關節的各種參數,包括扭矩、速度、位置等,采集時間小於10ms,並能把采集的數據形成曲線查看,包括扭矩曲線、速度曲線、加速度曲線。方便現場性能分析檢測。
4、伺服驅動器
機器人伺服係統精確控製電機速度、位置,可以將指令轉化為轉矩和轉速以驅動控製對象。采用高性能RC6伺服驅動器, RC6是一款緊湊型一體化網絡伺服驅動器。采用6多軸一體化設計,機身尺寸僅為231mm*316mm*81mm,而單軸額定電流可達5A。RC6采用標準的EtherCAT協議,配置成從站,與運動控製器實時通訊;

5、伺服調試與診斷軟件
伺服係統是機器人本體的核心部件,平台提供的伺服調試軟件(DriverStarter)運行在上位PC機,通過RS485與伺服驅動器通訊。DriverStarter具有完善的實時監控功能,實時監控係統狀態、運動狀態、 輸入輸出信號等。信號經分析處理,能實時顯示轉速、溫度和電流等多種波形曲線。並具有故障智能診斷功能,當異常發生時,上位機界麵能顯示故障位置,以及處理方法。可方便對機器人整機能調試,以及伺服係統的故障診斷與分析。
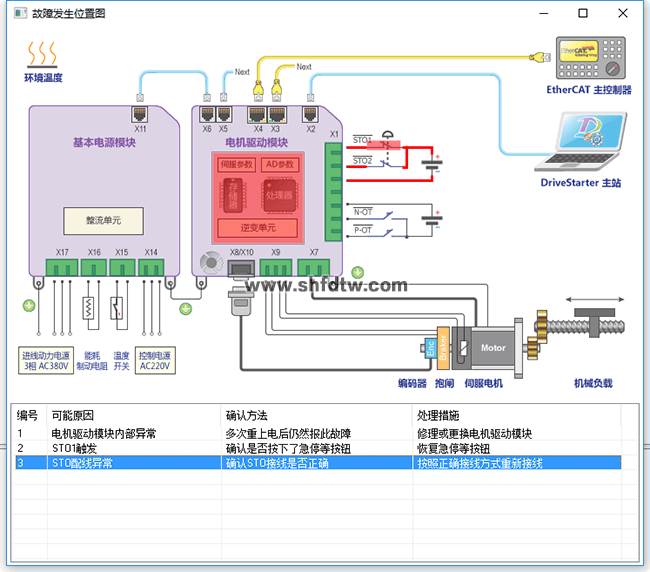
6、故障設置模塊
故障設置模塊安裝在網孔架上,模塊上有HMI。故障設置模擬機器人常見的典型故障,使學員掌握各種故障現象及排查方法。通過HMI設障與排障,自動操作,不用人工插拔線。通過人機界麵設置,能設置5種以上典型故障;排障恢複後的電控維護平台,可驅動機器人本體運行
7、本體聯調
解除故障後的機器人電控平台可以驅動機器人本體。能在本次采購的虛擬仿真軟件裏進行離線編程。後置的機器人可下載到機器人機器人控製器運行。控製係統能同時控製硬件實際機器本體與仿真軟件的虛擬機器人本體同時運行,包括位置、動作及狀態同步。
六、工業機器人拆裝與調試仿真軟件
RobotAC機器人裝調與維護仿真軟件,可作為本體拆裝實訓台的一個輔助功能,更好的讓學生熟悉機器人本體和拆裝本體。采用實際機器人本體型號為原型,進行高仿真建模,建立完整 真實展現機器人場景。同時,擁有高度逼近真實的表麵外觀和細節感受,創造出身臨其境般的實訓體驗。使用 3D 虛擬引擎技術模擬實際操作環境,支持學生在虛擬場景下進行工業機器人機械認知、原理認知、機械安裝與調試、常見故障排查,故障維修等操作。結合實際的設備相輔相成,滿足虛實相結合的教學。係統支持多點位配置。安裝運行方便,普通配置的 PC 機即可運行本軟件。
機器人本體安裝,包含了各軸之間安裝的次序及簡述工藝流程,注意事項,及機械部分的保養。整機安裝完成調試,以及調試過程中問題的發現及處理方式。
提供各處機器人零位標定技術,以及機器人整機精度測度,生產性能合格的機器人。

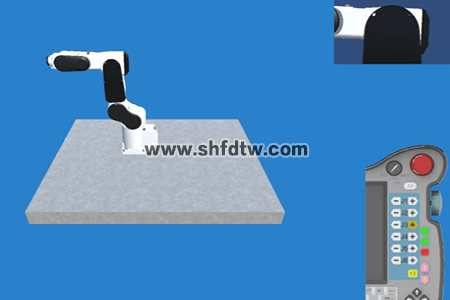
拆裝軟件部分截圖
軟件特點:
1、工業機器人裝調與維護仿真軟件主要是為學習工業機器人本體結構、本體裝配、本體維護等三維仿真軟件;采用先進的虛擬仿真技術,軟件具有虛擬裝配車間場景,模擬真實工業機器人的裝配環境。
2、采用真實工業機器人3D模型,並按硬件實訓台1:1尺寸建模
3、實時交互操作,場景中布置大量機器人知識展板,方便自主學習。
4、具備情景化、遊戲化實訓設計,每個項目教學設計過程涵蓋實訓示範、演練、測試模塊;
5、本體器件認知模塊:介紹每個本體器件的外觀,功能,使用注意事項目。
6、電氣器件認識模塊:介紹每個電氣器件的外觀,功能,使用注意事項目。
6、本體裝配與拆卸模塊:具有自動裝配與卸載、3D交互方式的手動裝配與拆卸、零件與組件的拆卸與裝配、裝配過程中所需工具的選擇以及拆卸全過程的信息記錄與提示等功能,具有真實感強、操作簡單、便於自學等優點。
7、整機調試模塊:本體裝配完成後,學習係統上電流程,通過示教器對機器人每個關節調試。以及關節零位調整。
8、機器人維護:對典型電氣故障進行維護操作
9、錄製功能:在練習操作時,錄製模塊對實訓過程中操作實時錄製功能,並可隨時對操作記錄進行查看;
10、考試模塊:機器人拆裝考核,並自動評分。
七、教學資源
1、配套實訓指導書
配套的工業機器人拆裝與調試實訓指導書,采用項目化教學。是一本係統講解了工業機器人結構原理、裝配、生產現場安裝、調試、故障排查及維護教學一體的實訓指導書。本體可以拆裝到螺釘級,並提供拆裝散件的實物圖。並配套全流程的真人視頻教程,詳細介紹各部分的機械安裝、拆解過程,以及注意事項 。包含以下實訓項目:
項目一:工業機器人基礎知識
任務一:工業機器人常用傳動機構及工作原理
任務二:工業機器人用減速器
問題與思考一
項目二:工業機器人的組成及安裝要求
任務一:工業機器人的主體
任務二:工業機器人控製係統
任務三工業機器人安裝要求
問題與思考二
項目三:機器人安裝調試常用工具的認知和使用
任務一:工業機器人機械裝配常用工具、測量儀器
任務二:工業機器人常用電工工具和電工儀表儀器
問題與思考三
項目四:工業機器人機械本體的拆裝與檢測
任務一:工業機器人機械部分的拆卸與檢測
任務二:工業機器人機械部分的裝配與檢測
問題與思考四
項目五:工業機器人電氣係統的裝配與調試
任務一:機器人電氣元件介紹及電氣安全知識
任務二:工業機器人電氣工作原理
任務三:機器人控製櫃電氣元件安裝與接線
任務四:機器人本體電氣元件安裝與接線
問題與思考五
項目六:工業機器人基本運動任務調試
任務一:工業機器人運動介紹
任務二:工業機器人標定介紹
任務三:工業機器人示教編程介紹
問題與思考六
項目七:工業機器人常見故障分析及精度檢測方法
任務一:機器人常見故障及 其解決辦法
任務二:機器人重複定位精度檢測方法
任務三:機器人絕對精度檢測方法
問題與思考七
項目八:工業機器人伺服係統調試
任務一:伺服調試軟件操作
任務二:機器人運動伺服性能測量分析
附錄1:螺釘擰緊力矩表
附錄2:機器人裝配作業指導書
2、真人拆裝視頻
真人工業機器人拆卸與裝配視頻二維碼,詳細每個步驟操作及要點講解。
機器人拆裝真人視頻
3、機器人三維設計圖紙
提供全套的機器人本體設計3D資料,采用STEP格式。學生可以學習機器人本體設計,也可以在原來的3D文件基礎上,根據需求進行修改,開發自己的機器人本體結構。並把設計文件加工成實際的機械零件,DIY動手裝配自己的機器人本體。
八、係統配置清單
|
序號 |
名稱 |
主要內容及規格 |
數量 |
備注 |
|
1 |
本體拆裝台機體 |
翻蓋型材桌麵、配有4個福馬輪 |
1套 |
|
|
2 |
工業機器人 |
VR6桌麵型6軸6kg機器人 |
1套 |
整機提供 |
|
3 |
工業機器人固定底座 |
可360°旋轉並固定 |
1套 |
|
|
4 |
工具箱 |
采用標準工具箱,並配有包裝的拆除工具,測試百分表 |
1套 |
|
|
5 |
電控網孔架 |
安裝電控器件的網孔支架 |
1套 |
|
|
6 |
機器人電控器件 |
電源、濾波器、機器人運動控製器、伺服驅動器、示教器、擴展IO。 |
1套 |
|
|
7 |
故障設置模塊 |
故障設置人機界麵,繼電器 |
1套 |
|
|
8 |
工控機 |
I5 CPU,4G內存,1G顯示存 |
1套 |
擴展選配 |
|
9 |
基礎訓練模塊 |
軌跡編程訓練,坐標編程訓練 |
1套 |
擴展選配 |
|
10 |
碼垛模塊 |
300*300mm平台,6工件碼垛 |
1套 |
擴展選配 |
|
11 |
機器人工具 |
TCP針對與吸盤符合工具 |
1套 |
擴展選配 |
|
12 |
伺服調試與診斷軟件 |
DriverStarter |
1套 |
|
|
13 |
機器人拆裝與調試仿真軟件 |
RobotAC |
1套 |
|
|
13 |
教學資源 |
1、《工業機器人安裝與調試》課程標準 2、《工業機器人安裝與調試》教材 3、工業機器人拆裝與調試視頻; 4、工業機器人solidworks 3D設計圖紙; |
1套 |
|




